The Train Control Projects Group of the R & DD had been pursuing various
projects allied to train control since 1967. One of these has been the
computer based speed supervisory system, the driver aid based on data
related to civil engineering and signalling speed limits. A second
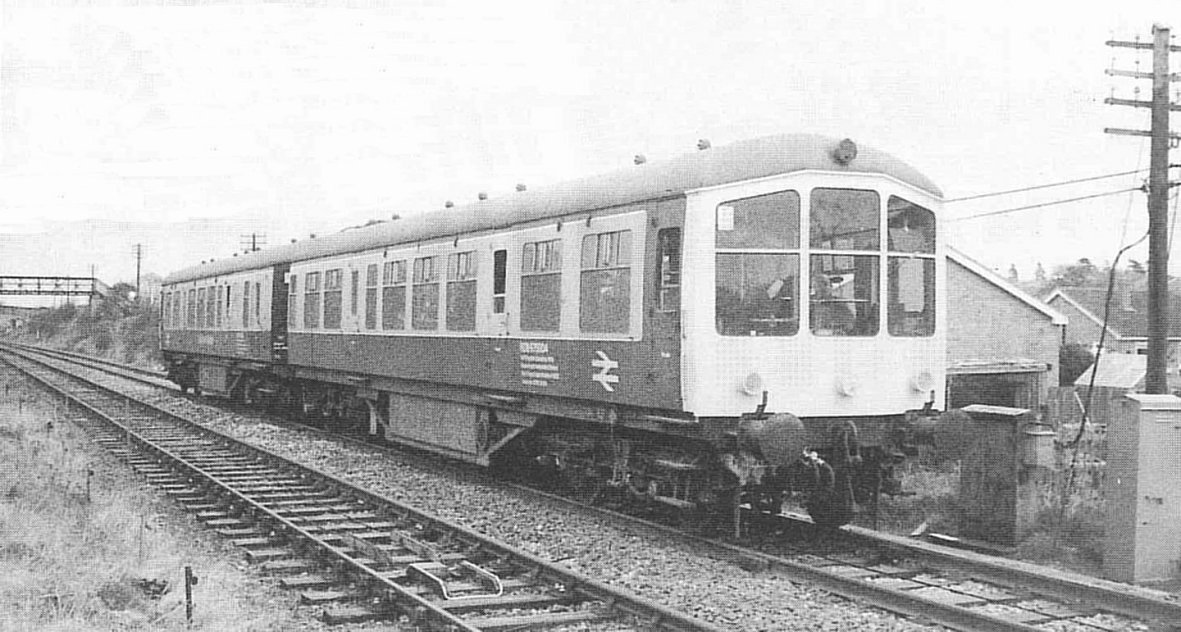
project has been the automatic control of a battery electric multiple
unit
RDB975003/4 with a view to gaining an appreciation of the problems
associated with automatic train operation. (ATO).
These two projects, each successful in their own right, have been
amalgamated to form the basis of a consolidated train
control package for B.R. known as BRATO. The BRATO package was accepted
in principle on 19 Nov 75 by the Train
Control Steering Group (Minute 75/23).1.2.
The BRATO Package
The nature of the original package and a suggested development programme
for the BRATO pilot scheme were
described in a report produced in 1976 for the Train Control Projects
Committee. In the same year a further report on a
consolidated package was issued in a final form as an R & DD internal
publication. A detailed time-scale chart covering
the full development period, 1975 to 1981, and the related activities
was also produced. The
documents referred to above constitute the remit for the pilot scheme
whose purpose is to demonstrate a realistically
sized ATO facility applied to a revenue earning inner-suburban passenger
service.
Automatic train operation
ATO
for the complete E.M.U. service between Altrincham and Alderley Edge is
proposed. This entails the equipping of 162
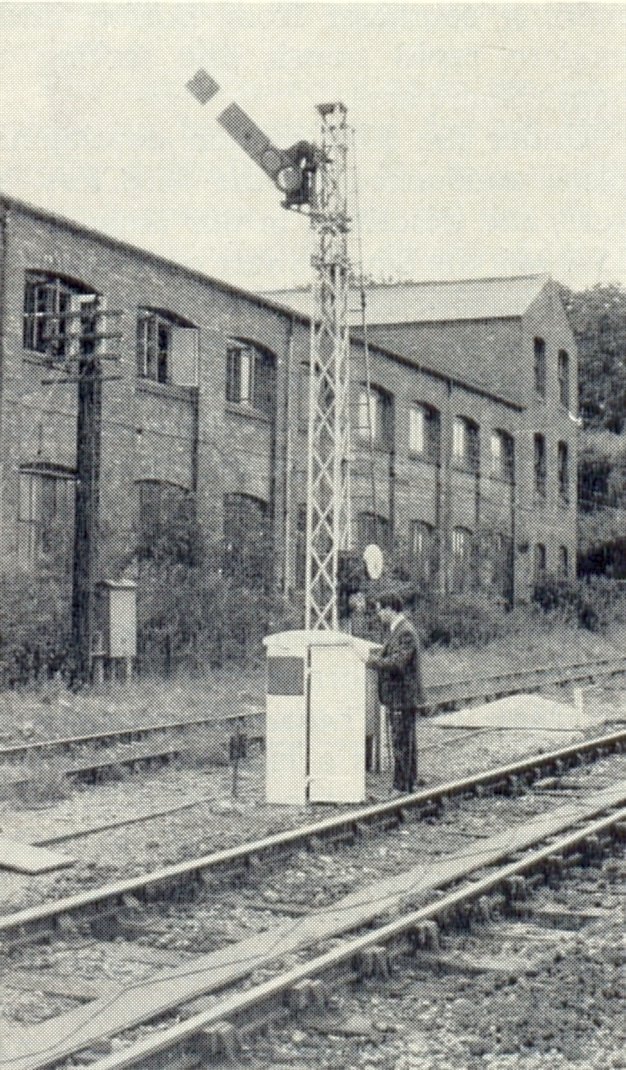
trackside locations, controlled from 170 signals, and the fitment of 21
Class 304 units. Two phases are envisaged for
the complete pilot scheme, Phase I being the fitment of 12 Class 304
units and the equipping of 43 signals between
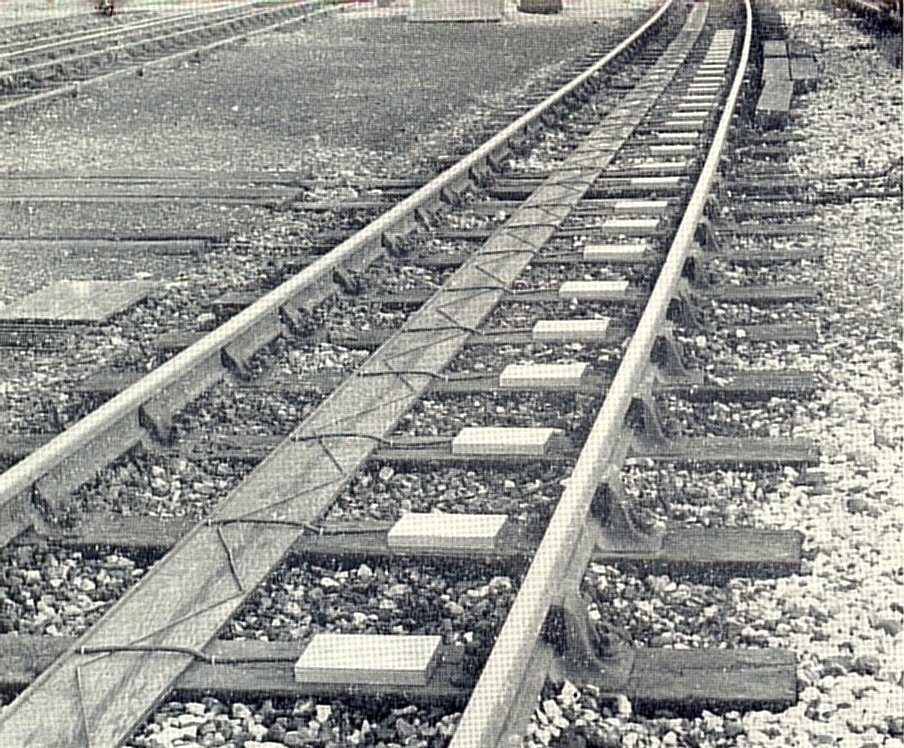
Altrincham and Oxford Road. The BRATO package is comprised of track and
train-borne equipment which, through
the operation of the traction and braking controls, enables trains
so equipped to be driven automatically, to observe
speed restrictions and brake to a stop at stations in accordance with a
pre-planned performance profile. These
trains will also obey signal aspects as real-time information transmitted
via a data link front the lineside. The train borne
equipment, mentioned above consists of:-
(a) Safety System, a watchdog for the full BRATO package.
(b) Regulatory System for implementing desired speed profiles (DSP).
(c) Autodriver System.
The Autodriver The function of the Autodriver will be to manipulate
automatically the traction and braking controls in order to achieve the
degree of train performance requested by the DSP providing that this
accords with safe operation as judged by the Safety System. The
operation of the computer based Autodriver will be dictated by its
operational specification and implemented by specific control principles
or algorithms written into its computer program. The form of these
algorithms and the manner in which they exercise control are governed by
two factors. Firstly, the form of the algorithms must be tailored
to suit the characteristic performance of the train as a whole and those
technical features of the traction and braking equipment which are to be
automatically controlled.
Secondly, the manner in which this control can be exercised and the
general hierarchical arrangement of the controller
will be governed by the availability of suitable control inputs and
monitor points for the traction and brake equipment.
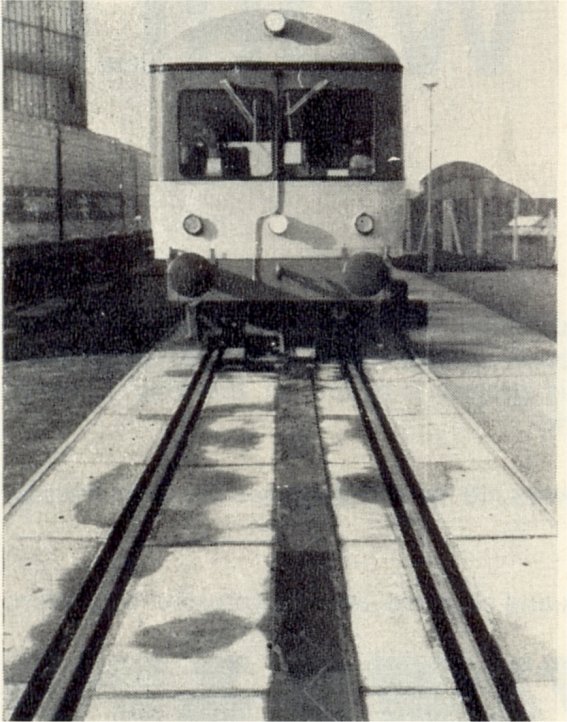
The Class 304 units have been in service since 1958 and during this time
a number of various train performance tests have been conducted.
However, these have mostly been investigations into the behaviour of
composition brake blocks
when subjected to full service applications. For the purposes of
designing automatic train control principles a more
comprehensive knowledge of train performance over a range of brake
applications is necessary. Similarly for automatic
traction control further information was required than that readily
available from either the manufacturer or the CM &
EE department. With an appreciation of these factors in mind, it was
clearly necessary to conduct a series of carefully
controlled characterisation tests on one or more Class 304 units.
|